
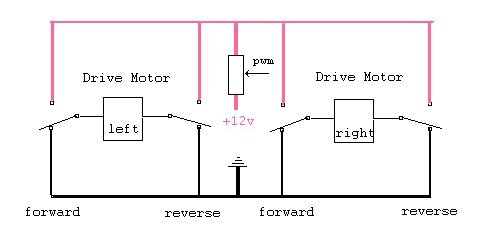
The overall plan is again very basic. The software drives the four relays in a simple bridge configuration. So simple in fact that the software has to allow change over time from full forward to full reverse, to limit current surges. I have now installed current limiting and speed control via a pulse width control in the power feed lines to the drive motors. I am using Hexfet transistors on large heatsinks, as these devices were rated at 39 amps. I am now of the opinion that the limiting factor on these transistors is the size of the leads into the package. To date these have proved very rugged the relay points seems to be the weakest link in the chain.
On a light historical note the original testing was done with a standard atari joystick 9 pin port connected to call the relays from the joystick pins. This gave both an instant 'feel' for the type of control that would be needed, and great fun just driving the 3 foot high basic frame around the garden, at a fast walking pace. However the cat was not too impressed.